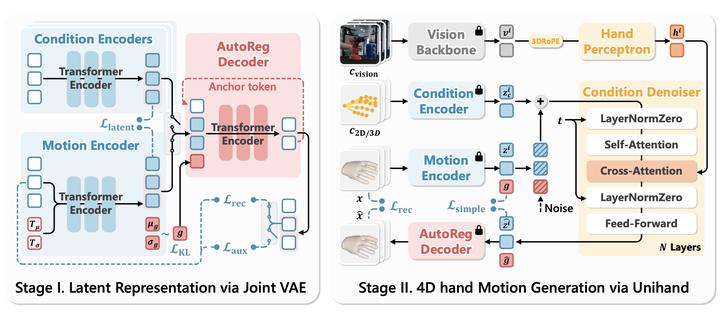
 Overall framework
Overall framework
Abstract
UniHand formulates hand motion estimation and generation as conditional motion synthesis. It aligns heterogeneous inputs such as MANO parameters, 2D skeletons, and visual observations into a shared latent space, then uses a latent diffusion model to generate consistent hand motion sequences under diverse controls.
Type
Publication
In International Conference on Learning Representations (ICLR)
Tong WU 吴桐
Assistant Professor @ Fudan
My research interests include 3d vision, long-tailed recognition, and robustness.